Home › News › 20-Legged Sea Urchin Robot Defies Robot Engineering Norms
Science
TUESDAY, JUNE 16, 2026 ED.167
20本脚のウニ型ロボット「アルゴス」、ロボット工学の常識をくつがえす
20-Legged Sea Urchin Robot Defies Robot Engineering Norms
Y By Yomimaru JLPT N4-N1
Jun 16, 2026 · 2 MIN READ
要約ようやく The story in English
A robot designed using math climbs walls and moves in all directions.
N4 N3 N1
Same story, every JLPT level. Tap a level to switch, and all levels are free.
スタジオ の 皆さんみなさん 、 こんにちは 。 田中たなか です 。 Yomimaru 東京とうきょう スタジオ から 生放送なまほうそう で お伝えおつたえ し ます 。 本日ほんじつ は 、 アメリカ の デューク 大学だいがく が 開発かいはつ し た 、 20 本ほん の 脚あし を 持つもつ ウニ の よう な 不思議ふしぎ な ロボット について です 。 [ 1 ][ 2 ] この ロボット は 、 数学すうがく の 考え方かんがえかた を 使っつかっ て 作らつくら れ 、 どの 方向ほうこう に も 自由じゆう に 動くうごく こと が できる と いい ます 。 [ 1 ][ 2 ]
第1章: 数学から生まれた不思議な形
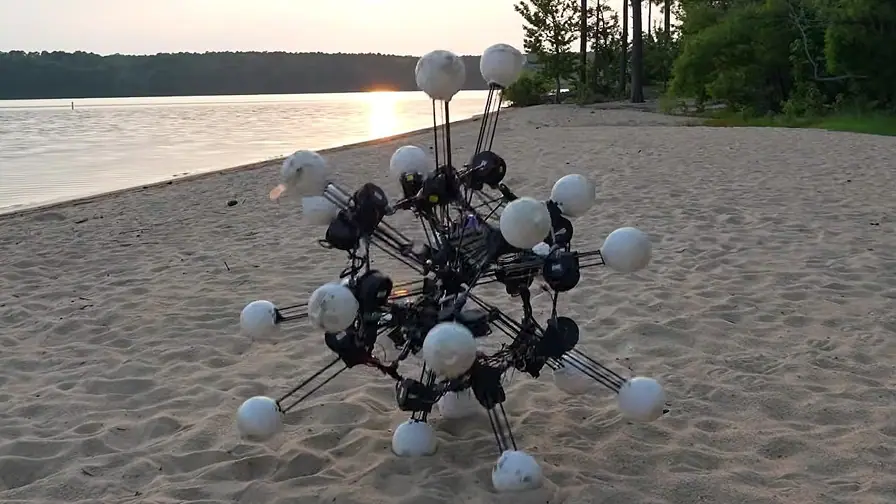
皆さんみなさん 、 ロボット と 聞くきく と 、 人ひと や 犬いぬ の よう な 左右さゆう 対称たいしょう の 形かたち を 思い浮かべるおもいうかべる かも しれ ませ ん 。 しかし 、 デューク 大学だいがく の 研究けんきゅう チーム は 、 その 常識じょうしき に 挑戦ちょうせん し まし た 。 [ 1 ] 彼らかれら が 作っつくっ た ロボット 「 アルゴス 」 は 、 前まえ に 向きむき が なく 、 20 本ほん の 脚あし と 20 個こ の カメラ 「 目め 」 を 体からだ の あちこち に 持っもっ て い ます 。 [ 1 ][ 2 ] この 目め は すべて の 方向ほうこう を ほぼ 360 度ど 見るみる こと が できる ん です 。 [ 2 ] 脚あし は 伸びのび 縮みちぢみ する 望遠鏡ぼうえんきょう の よう な し くみ で 、 一いち 本ほん の 値段ねだん は 約やく 4 万まん 5000 円えん ( 300 ドル ) です 。 [ 2 ]
研究けんきゅう チーム は 、 数学すうがく を 使っつかっ て 「 どの 方向ほうこう に も 均等きんとう に 動けるうごける 形かたち 」 を 考えかんがえ まし た 。 その 結果けっか 、 アルゴス の 動きうごき の バランス を 数値すうち で 表すあらわす 「 動的どうてき 等とう 方かた 性せい スコア 」 は 0 . 91 に 達したっし まし た 。 [ 2 ] これ は 、 砂すな の 上うえ や 森もり の 中なか 、 壁かべ の 間ま など 、 いろいろ な 場所ばしょ で うまく 動けるうごける こと を 意味いみ し ます 。 [ 2 ]
第2章: 障害に強く、どんな場所でも動く
アルゴス の すごい ところ は 、 動きうごき やす さ だけ で は あり ませ ん 。 研究けんきゅう チーム が 行っおこなっ た 実験じっけん で は 、 わざと 押しおし たり 、 バランス を 崩しくずし たり 、 脚あし を 壊しこわし たり し て も 、 アルゴス は すぐ に 安定あんてい し て 動きうごき 続けつづけ まし た 。 [ 1 ] なんと 、 3 本ほん の 脚あし が 動かうごか なく なっ て も 、 走りはしり 続けるつづける こと が でき た の です 。 [ 1 ] また 、 約やく 4 . 5 キログラム の 荷物にもつ を 持っもっ て ほぼ 最高さいこう 速度そくど で 走っはしっ たり 、 大きなおおきな 箱はこ を 押しおし ながら 転がっころがっ たり 、 狭いせまい 壁かべ の 間ま を 上うえ に 登るのぼる こと も でき まし た 。 [ 1 ]
この 強つよ さ の 秘密ひみつ は 、 体からだ の どこ か 一いち か所かしょ に 頼らたよら ない 「 分散ぶんさん 型がた 」 の しくみ に あり ます 。 [ 2 ] たとえば 、 虫むし の 複眼ふくがん や ウニ の 体からだ 全体ぜんたい で 感じるかんじる し くみ と 同じおなじ よう に 、 一部いちぶ が 壊れこわれ て も 残りのこり の 部分ぶぶん で ちゃんと 動くうごく こと が できる の です 。 [ 2 ]
第3章: 未来の活用と専門家の声
この ユニーク な ロボット は 、 どの よう な 未来みらい で 役に立つやくにたつ の でしょ う か 。 研究けんきゅう チーム の 動画どうが で は 、 危険きけん な 場所ばしょ の 調査ちょうさ や 、 山やま 火事かじ を 早くはやく 見つけるみつける ため の 森もり の 監視かんし 、 災害さいがい の とき に 動くうごく 監視かんし カメラ として の 利用りよう が 紹介しょうかい さ れ まし た 。 [ 2 ] さらに 、 重力じゅうりょく が 低いひくい 環境かんきょう で も うまく 動くうごく ため 、 他た の 惑星わくせい の 探査たんさ に も 使えるつかえる かも しれ ない と いい ます 。 [ 2 ]
研究けんきゅう に 参加さんか し た ボーシー・シア 博士はかせ は こう 話しはなし ます 。 「 動的どうてき な 対称たいしょう 性せい を 使っつかっ て 設計せっけい する こと は 、 ただ の 理論りろん で は 終わりおわり ませ ん 。 この 設計せっけい が あれ ば 、 平らたいら で ない 場所ばしょ や 、 もの が 散らかっちらかっ た 環境かんきょう 、 低てい 重力じゅうりょく の 場所ばしょ でも 使えるつかえる ロボット が 生まれうまれ ます 。 できる こと が 大きくおおきく 変わるかわる の です 。 」[ 2 ] 今いま は まだ 実験じっけん の 段階だんかい で 、 コスト の 問題もんだい など も あり ます が 、 未来みらい の ロボット の 形かたち を 変えるかえる 可能かのう 性せい を 秘めひめ て い ます 。 [ 2 ]
以上いじょう 、 20 本ほん の 脚あし を 持つもつ 不思議ふしぎ な ロボット 「 アルゴス 」 について お伝えおつたえ し まし た 。 スタジオ から 田中たなか が お送りおおくり し まし た 。
みなさん 、 こんにちは 。 Yomimaru の 田中たなか です 。 今日きょう は 、 アメリカ の デューク 大学だいがく が 発表はっぴょう し た 、 とても 変わっかわっ た ロボット について お伝えおつたえ し ます 。 その 名な は 「 アルゴス 」 。 ウニ の よう な 形かたち を し た 、 20 本ほん の 脚あし と 20 の 目め を 持つもつ ロボット です 。 [ 1 ][ 2 ]
第1章: ウニからヒントを得た不思議な形
アルゴス は 、 前まえ や 後ろうしろ が なく 、 あらゆる 方向ほうこう に 同じおなじ よう に 動けうごけ ます 。 脚あし は 望遠鏡ぼうえんきょう の よう に 伸びのび 縮みちぢみ し 、 先端せんたん に は 深ふか さ を 測れるはかれる カメラ が 一つひとつ ずつ 付いつい て い ます 。 20 個こ の 目め で 、 ほぼ 360 度ど の 視野しや を カバー できる の です 。 [ 2 ] 研究けんきゅう チーム は 、 数学すうがく を 使っつかっ て 「 どの 方向ほうこう に も 均等きんとう に 動けるうごける 形かたち 」 を 計算けいさん し 、 この デザイン を 生み出しうみだし まし た 。 [ 1 ][ 2 ]
第2章: 数学が証明した「非対称」の強さ
これ まで の ロボット は 、 人間にんげん や 動物どうぶつ の よう に 左右さゆう 対称たいしょう で ある こと が 普通ふつう でし た 。 しかし 、 アルゴス は その 常識じょうしき を くつがえし ます 。 [ 1 ] 実験じっけん で は 、 砂すな の 上うえ や ジャングル の よう な 場所ばしょ 、 壁かべ の 間ま など 、 さまざま な 環境かんきょう で 動くうごく こと が でき まし た 。 さらに 、 故意こい に 押しおし たり 、 バランス を くずし たり 、 脚あし の 一部いちぶ を こわし て も 、 安定あんてい し て 動きうごき 続けつづけ まし た 。 3 本ほん の 脚あし が 使えつかえ なく なっ て も 走行そうこう を 続けつづけ 、 約やく 4 . 5 kg の 荷物にもつ を 運んはこん だり 、 高たか さ 約やく 91 cm の 立方体りっぽうたい を 転がしころがし ながら 押しおし たり する こと も 可能かのう です 。 [ 1 ] この 強つよ さ の 秘密ひみつ は 、 昆虫こんちゅう の 複眼ふくがん や ウニ の 体からだ の よう に 、 センサー と 動きうごき が 一いち か所かしょ に 集中しゅうちゅう せ ず 、 分散ぶんさん し て いる こと に あり ます 。 [ 2 ] 研究けんきゅう チーム は 、 動きうごき の 「 等ひとし 方かた 性せい ( どの 方向ほうこう に も 同じおなじ 性質せいしつ を 持つもつ こと ) 」 の 高たか さ を 数値すうち 化か し 、 0 . 91 という スコア を 達成たっせい し まし た 。 [ 2 ]
第3章: 災害現場から宇宙まで — 期待される役割
研究けんきゅう チーム は 、 アルゴス が 将来しょうらい 、 危険きけん な 場所ばしょ の 探索たんさく や 山やま 火事かじ の 早期そうき 発見はっけん 、 災害さいがい 地域ちいき で の 移動いどう 型がた 監視かんし 拠点きょてん として 役立つやくだつ と 考えかんがえ て い ます 。 重力じゅうりょく が 低いひくい 環境かんきょう で も 効果こうか 的てき に 動けるうごける ため 、 ほか の 惑星わくせい の 探査たんさ に も 使えるつかえる かも しれ ませ ん 。 [ 2 ] 共著きょうちょ 者しゃ の ボーシー・シア 博士はかせ は 、 「 動的どうてき な 対称たいしょう 性せい で 設計せっけい する こと は 、 理論りろん 上じょう の 好奇こうき 心しん だけ で は あり ませ ん 。 不ふ 整地せいち や 散らかっちらかっ た 環境かんきょう 、 低てい 重力じゅうりょく の 場ば でも 使えるつかえる ロボット を 生み出しうみだし ます 。 できる こと を 変えかえ られる の です 」 と 話しはなし て い ます 。 [ 2 ]
以上いじょう 、 田中たなか が お伝えおつたえ し まし た 。
スタジオより
本日ほんじつ は 、 これ まで の ロボット 設計せっけい の 常識じょうしき を 覆すくつがえす 、 20 本ほん の 脚あし と 20 の 目め を 持つもつ ウニ 型がた ロボット 「 アルゴス 」 について お伝えおつたえ し ます 。 デューク 大学だいがく の 研究けんきゅう チーム が 開発かいはつ し た この ロボット は 、 対称たいしょう 性せい に 縛らしばら れ ない 全ぜん 方向ほうこう 移動いどう を 実現じつげん し 、 過酷かこく な 環境かんきょう で も 活動かつどう できる 可能かのう 性せい を 秘めひめ て い ます 。 田中たなか キャスター が 詳しくくわしく 解説かいせつ し ます 。
第1章: 数学が生んだ異形のロボット
自然しぜん 界かい の 多くおおく は 対称たいしょう 性せい を 持ちもち 、 人間にんげん も また 、 自らみずから が 作り出すつくりだす ロボット に 左右さゆう 対称たいしょう の 形状けいじょう を 与えあたえ て き まし た 。 しかし 、 デューク 大学だいがく の 研究けんきゅう 者しゃ たち は 、 そうした 前提ぜんてい に 挑戦ちょうせん し 、 ウニ に 似に た 20 脚きゃく の ロボット 「 アルゴス 」 を 開発かいはつ し まし た 。 この ロボット に は 前後ぜんご が なく 、 20 本ほん の 脚あし と 20 個こ の 深度しんど カメラ が ほぼ 全ぜん 方向ほうこう を 向いむい て 配置はいち さ れ て い ます 。 [ 1 ][ 2 ] その 外見がいけん は 、 まるで 数学すうがく の 実験じっけん 室しつ から 抜け出しぬけだし て き た か の よう な 異形いぎょう さ です が 、 それ こそ が 設計せっけい の 核心かくしん です 。 研究けんきゅう チーム は 数学すうがく 的てき に 「 あらゆる 方向ほうこう へ 均等きんとう に 動けるうごける 形かたち 」 を 追求ついきゅう し 、 動的どうてき 等とう 方かた 性せい スコア 0 . 91 を 達成たっせい し まし た 。 [ 2 ]
第2章: 対称性からの解放と全方向移動
これ まで ロボット 工学こうがく で は 対称たいしょう 性せい が 当然とうぜん 視し さ れ て き まし た が 、 アルゴス は その 束縛そくばく を 断ち切りたちきり まし た 。 従来じゅうらい の 人ひと 型がた や 犬いぬ 型がた と は 異なりことなり 、 特定とくてい の 前後ぜんご や 上下じょうげ を 持たもた ない この ロボット は 、 あらゆる 方向ほうこう へ 均等きんとう に 移動いどう できる よう に 設計せっけい さ れ て い ます 。 [ 1 ][ 2 ] 実際じっさい に 、 砂地すなじ や 密林みつりん 、 さらに は 壁面へきめん など 多様たよう な 環境かんきょう で の 走行そうこう が 実証じっしょう さ れ 、 狭いせまい 壁かべ の 間ま を 脚あし を 交互こうご に 突っ張りつっぱり 伸ばしのばし ながら 垂直すいちょく に 登るのぼる こと に も 成功せいこう し まし た 。 [ 1 ] また 、 3 本ほん の 脚あし が 機能きのう 不全ふぜん に なっ て も 動きうごき 続けつづけ られる 高いたかい 耐 障害しょうがい 性せい も 確認かくにん さ れ て い ます 。 [ 1 ][ 2 ]
第3章: 分散型構造が生む耐久性
アルゴス の 頑丈がんじょう さ の 秘密ひみつ は 、 単一たんいつ の 視点してん や 動力どうりょく に 依存いぞん し ない 分散ぶんさん 型がた の 構造こうぞう に あり ます 。 これ は 、 複眼ふくがん を 持つもつ 昆虫こんちゅう や 全身ぜんしん で 感知かんち する ウニ が 一部いちぶ の 感覚かんかく 器き を 失っうしなっ て も 機能きのう し 続けるつづける の と 同じおなじ 原理げんり です 。 [ 2 ] テスト で は 、 研究けんきゅう 者しゃ が 故意こい に アルゴス を 押しおし たり バランス を 崩しくずし たり 破損はそん さ せ たり し まし た が 、 衝突しょうとつ 後ご も 素早くすばやく 安定あんてい を 取り戻しとりもどし 、 約やく 4 . 5 kg の 積荷つみに を ほぼ 全速力ぜんそくりょく で 運びはこび 、 約やく 91 cm の 立方体りっぽうたい を 転がしころがし ながら 押すおす こと に も 成功せいこう し まし た 。 [ 1 ] 各かく 脚あし は 伸縮しんしゅく 式しき で 、 1 本ほん あたり 約やく 300 ドル かかり ます が 、 20 個こ の 深度しんど カメラ が 360 度ど 近いちかい 視野しや を 確保かくほ し て いる ため 、 一いち 点てん 集中しゅうちゅう 型がた の 能力のうりょく に 頼らたよら ず 、 センサー と 脚あし の 協調きょうちょう によって 有用ゆうよう な 動作どうさ が 生み出さうみださ れ ます 。 [ 2 ]
第4章: 応用への期待と課題
研究けんきゅう チーム は 2026 年ねん 5 月つき 28 日にち に 公開こうかい し た 動画どうが で 、 アルゴス の 設計せっけい が 拓くひらく 応用おうよう 可能かのう 性せい として 、 危険きけん 地帯ちたい の 探索たんさく 、 山やま 火事かじ 監視かんし の ため の 森林しんりん モニタリング 、 災害さいがい 地域ちいき で の 移動いどう 型がた 監視かんし 拠点きょてん 、 そして 低てい 重力じゅうりょく 環境かんきょう で も 機能きのう する こと から 惑星わくせい 探査たんさ へ の 投入とうにゅう など を 挙げあげ て い ます 。 [ 2 ] 共著きょうちょ 者しゃ の ボーシー・シア 博士はかせ は 「 動的どうてき 対称たいしょう 性せい で 設計せっけい する こと は 単なるたんなる 理論りろん 的てき 好奇こうき 心しん に とどまら ず 、 不ふ 整地せいち や 雑然ざつぜん と し た 環境かんきょう 、 低てい 重力じゅうりょく で も 配備はいび できる ロボット を 生み出しうみだし 、 できる こと を 変えかえ られる 」 と 述べのべ て い ます 。 [ 2 ] ただし 、 現げん 段階だんかい は コンセプト 実証じっしょう で あり 、 実用じつよう 化か に は 耐久たいきゅう 性せい や エネルギー 効率こうりつ 、 小型こがた 化か 、 そして 高こう コスト といった 課題かだい が 残さのこさ れ て い ます 。 [ 2 ]
識者の声
カラパイア の 記事きじ に よる と 、 読者どくしゃ から は 「 画像がぞう を 見るみる と 明らかあきらか に 対称たいしょう 性せい が ある 」 という 指摘してき や 、 「 転がるころがる だけ で 歩いあるい て いる わけ で は ない 」 といった 意見いけん 、 また 「 NASA が 火星かせい 探査たんさ に 関心かんしん を 寄せるよせる かも しれ ない 」 という 期待きたい の 声こえ が 寄せよせ られ て い ます 。 [ 2 ] こうした 多様たよう な 反応はんのう は 、 アルゴス が 既存きそん の 価値かち 観かん に 挑戦ちょうせん し て いる 証左しょうさ と 言えるいえる でしょ う 。
エンディング
以上いじょう 、 20 本ほん 脚あし の ウニ 型がた ロボット 「 アルゴス 」 が 切り開くきりひらく 、 新たあらた な ロボット 設計せっけい の 可能かのう 性せい について お伝えおつたえ し まし た 。 数学すうがく が 導くみちびく 非対称ひたいしょう の 形かたち は 、 これから の 探査たんさ や 防災ぼうさい の 現場げんば を 一変いっぺん さ せる かも しれ ませ ん 。 田中たなか キャスター が スタジオ から お 届けとどけ し まし た 。
❖
Sources 2
This is an original Japanese adaptation written by Yomimaru for learners. Read the full reporting at the sources above to support the original publishers.
Read this in Yomimaru
Tap any word for instant lookups, ask Tomo-Sensei to explain the grammar, and save words to your own study deck.
Open in Yomimaru →
Read at your level
Every Yominews story is adapted to each level. Pick yours.
Beginner Elementary Intermediate Advanced Native-level